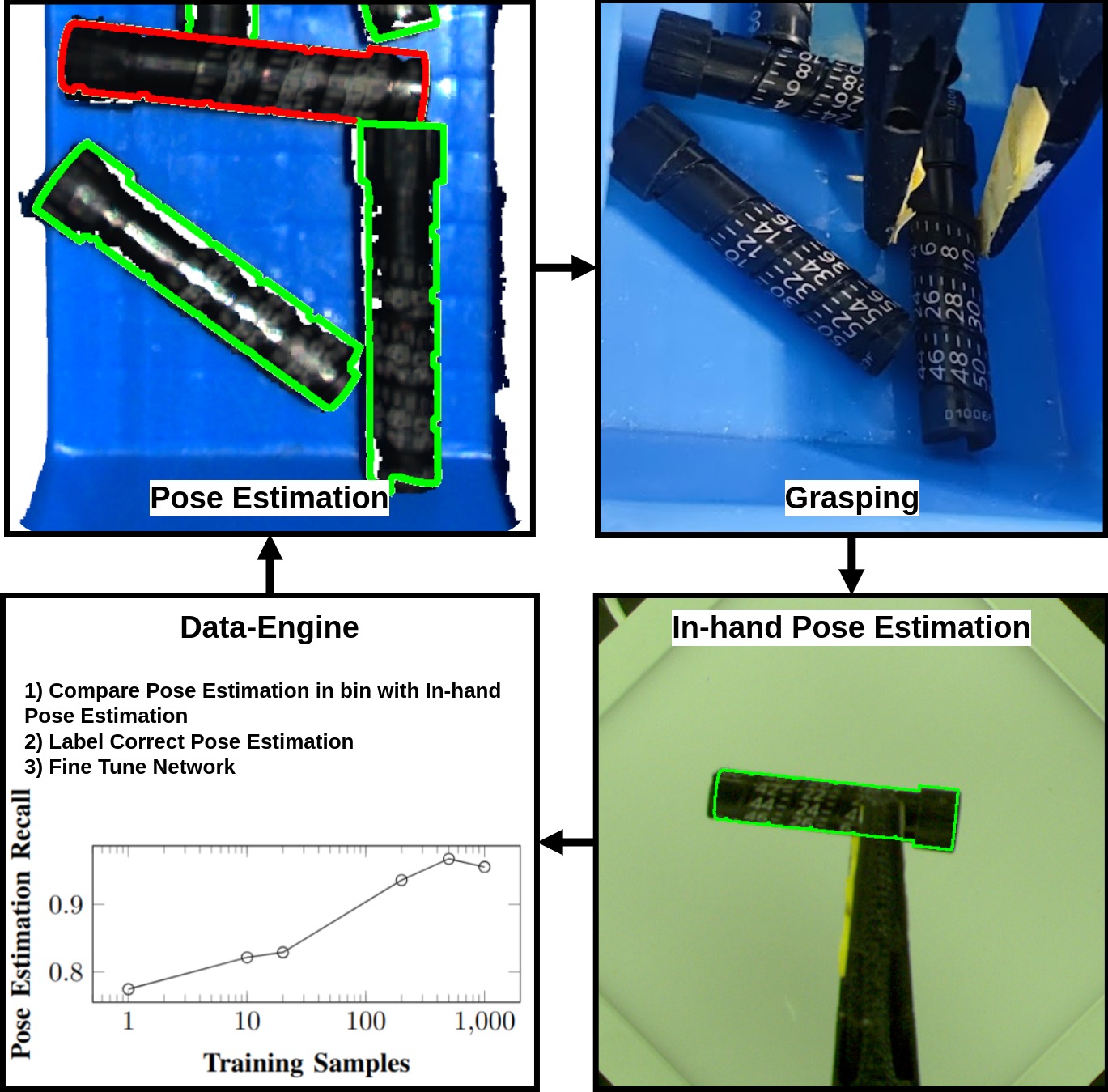
Good Grasps Only: A data engine for self-supervised fine-tuning of pose estimation using grasp poses for verification
This site is a collection of links related to the project GOGO engine.
The GOGO engine uses keymatchnet for the pose estimation. You can find the repostisory for keymatchnet at https://github.com/fhagelskjaer/keymatchnet.
With keymatchnet installed, you can run keymatchnet with the trained weights from GOGO engine the following way:
keymatchnet --model_root "frhag/keymatchnet_gogo_engine" --obj testdata/09_BGPSL6-9-L30-F7.stl --scene testdata/point_cloud.pcd --visu True
The code for running the in bin pose estimation and grasp estimation is available at https://github.com/fhagelskjaer/sdui40binpick.